Sensors, Free Full-Text
Por um escritor misterioso
Last updated 21 março 2025
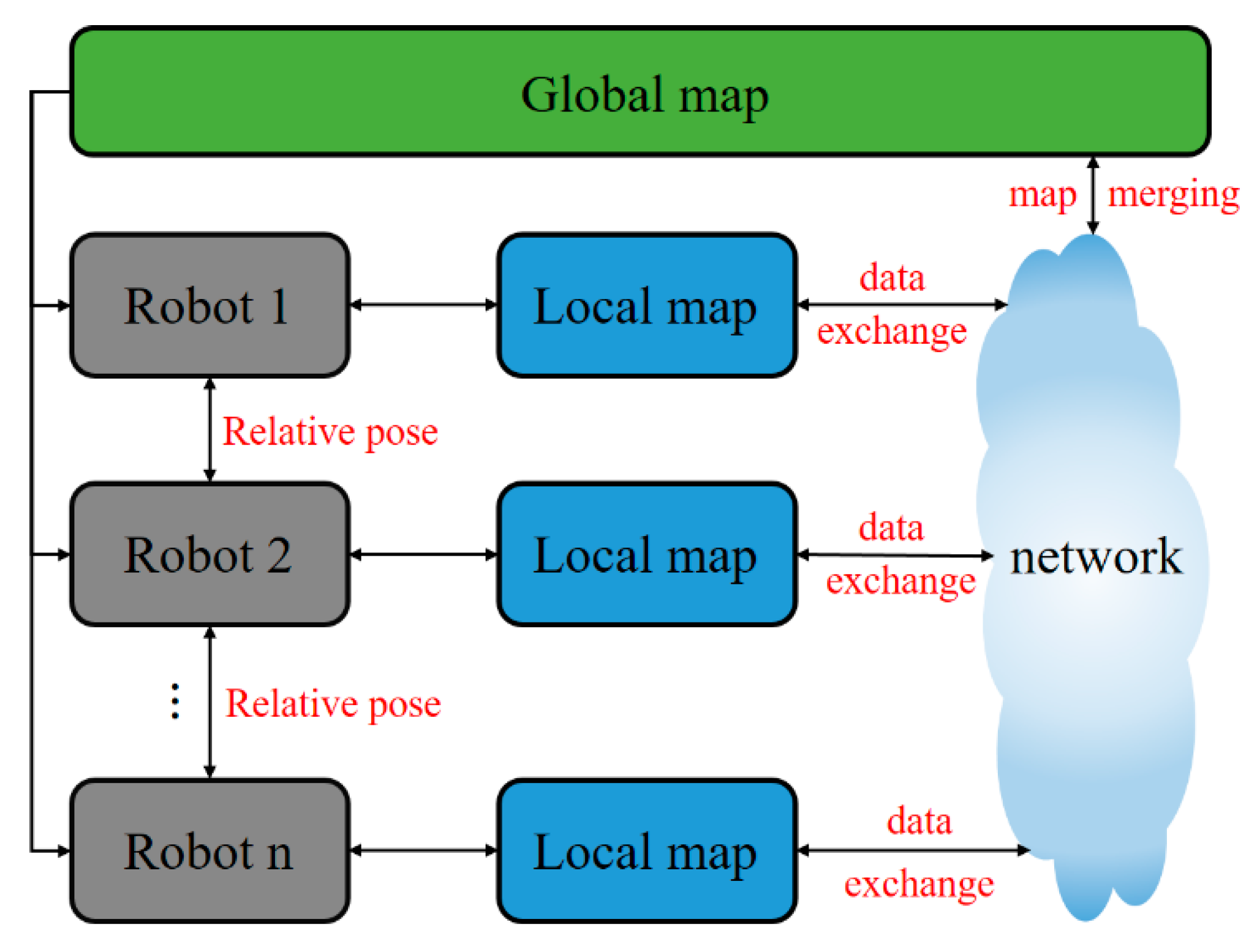
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

Bosch 0261230093 Original Equipment Fuel Pressure

Sensors for Pressure Mapping and Force Measurement
Freestyle Libre 2 Sensor $160.93/Each Modern Medical Products

Air Intake Pressure Sensor MAP Sensor 079800-4250 37830-PAA

Cync / C by GE Setting Up Wire-Free Motion Sensors

Wi-Fi Motion Sensor w/ Message Alerts • Go Simple Home
Sensors, Free Full-Text

CGM Free Trial Sign Up for the MyFreeStyle Program

Angewandte Chemie International Edition: Early View
Recomendado para você
-
 Festivais em 2023 — Ingresse21 março 2025
Festivais em 2023 — Ingresse21 março 2025 -
Ferrão invadiu uma favela no vidigal #ferraocx #grotarp #fivemrp21 março 2025
-
 Duda Ferrão Games21 março 2025
Duda Ferrão Games21 março 2025 -
Eduarda Ferrão - Latest version for Android - Download APK21 março 2025
-
 Petición · (EN/ES) Bring Pac-Man Museum and Pac-Man and the21 março 2025
Petición · (EN/ES) Bring Pac-Man Museum and Pac-Man and the21 março 2025 -
 Microorganisms, Free Full-Text21 março 2025
Microorganisms, Free Full-Text21 março 2025 -
 Notícias - Plataforma das Instituições Comunitárias21 março 2025
Notícias - Plataforma das Instituições Comunitárias21 março 2025 -
 Notícias da UFSC21 março 2025
Notícias da UFSC21 março 2025 -
 Foods, Free Full-Text21 março 2025
Foods, Free Full-Text21 março 2025 -
 Dúvida Animal Por que abelhas morrem quando picam? - Jornal Joca21 março 2025
Dúvida Animal Por que abelhas morrem quando picam? - Jornal Joca21 março 2025


você pode gostar
-
 1001 jogos para jogar antes de morrer - parte 4 - Critical Hits21 março 2025
1001 jogos para jogar antes de morrer - parte 4 - Critical Hits21 março 2025 -
STL file Boca Juniors Table Lamp・3D printer design to download・Cults21 março 2025
-
![Deepwoken Oath Tier List: Best Oath Rank [December 2023]](https://gamestouse.com/wp-content/uploads/2023/02/Arcwarder.webp) Deepwoken Oath Tier List: Best Oath Rank [December 2023]21 março 2025
Deepwoken Oath Tier List: Best Oath Rank [December 2023]21 março 2025 -
 Pool Party - festinha no quintal — BLOG DO MATH21 março 2025
Pool Party - festinha no quintal — BLOG DO MATH21 março 2025 -
 Último dia para assistir na Netflix ao filme de ação mais intenso e alucinante do cinema nos últimos anos - Revista Bula21 março 2025
Último dia para assistir na Netflix ao filme de ação mais intenso e alucinante do cinema nos últimos anos - Revista Bula21 março 2025 -
 Daniil Medvedev seals Vienna Open title, while Felix Auger-Aliassime wins the Swiss Indoors in Basel, Tennis News21 março 2025
Daniil Medvedev seals Vienna Open title, while Felix Auger-Aliassime wins the Swiss Indoors in Basel, Tennis News21 março 2025 -
 Aoashi season 2 renewal status: Plentiful source material gives21 março 2025
Aoashi season 2 renewal status: Plentiful source material gives21 março 2025 -
 STATE OF DECAY 3 Trailer (2020)21 março 2025
STATE OF DECAY 3 Trailer (2020)21 março 2025 -
 Prince of Persia - xbox360 - Walkthrough and Guide - Page 1 - GameSpy21 março 2025
Prince of Persia - xbox360 - Walkthrough and Guide - Page 1 - GameSpy21 março 2025 -
 Baixar Damas 2.28 Android - Download APK Grátis21 março 2025
Baixar Damas 2.28 Android - Download APK Grátis21 março 2025