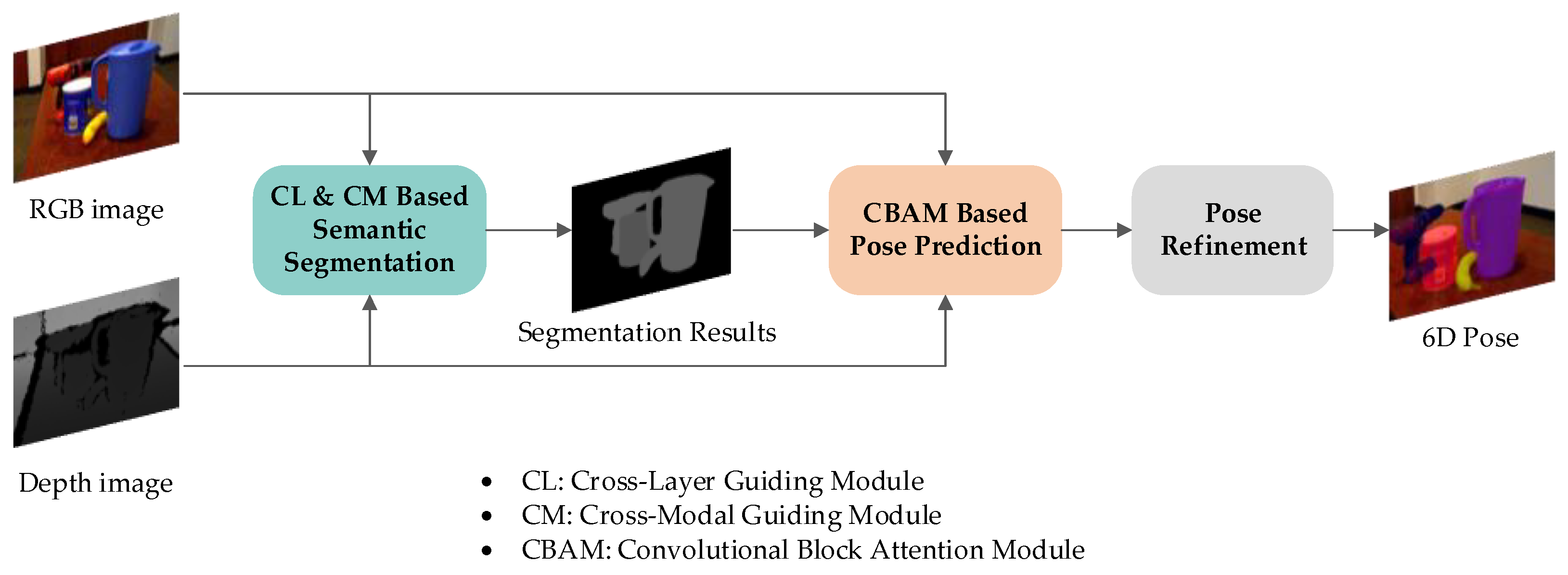
Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 21 março 2025

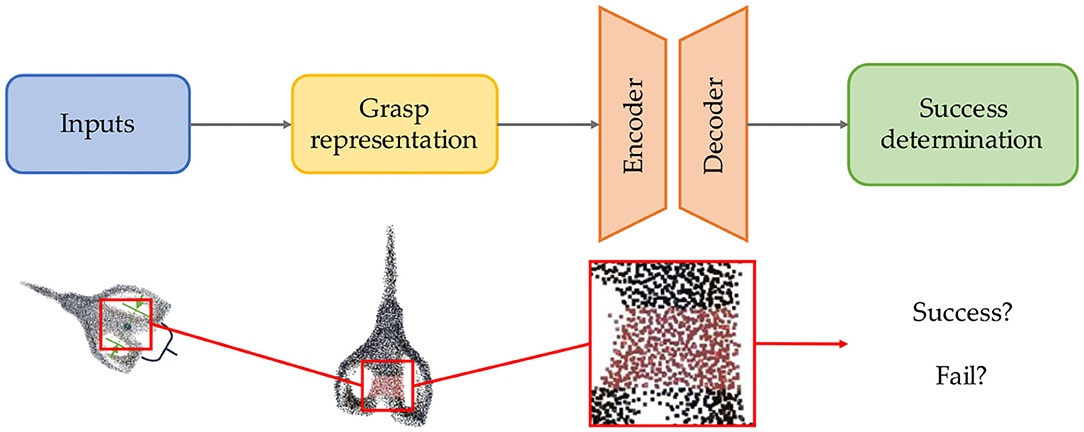
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.

PDF) Efficient and Accurate Candidate Generation for Grasp Pose
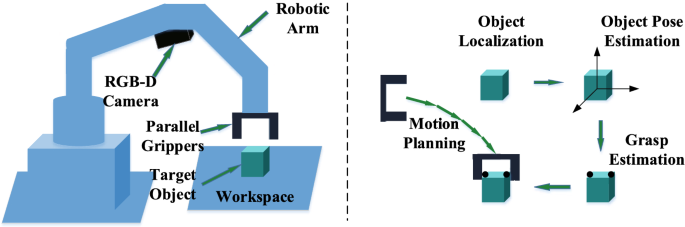
Vision-based robotic grasping from object localization, object
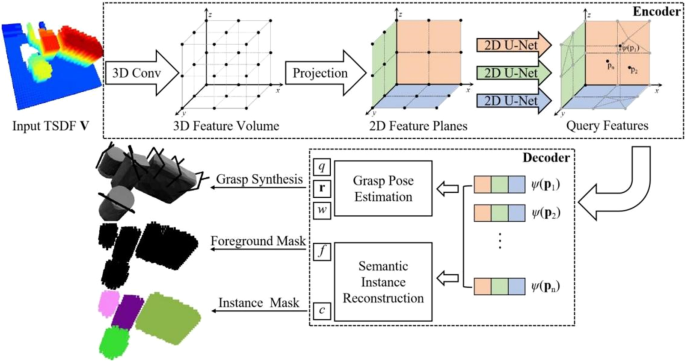
6-DoF grasp pose estimation based on instance reconstruction
Frontiers Robotics Dexterous Grasping: The Methods Based on
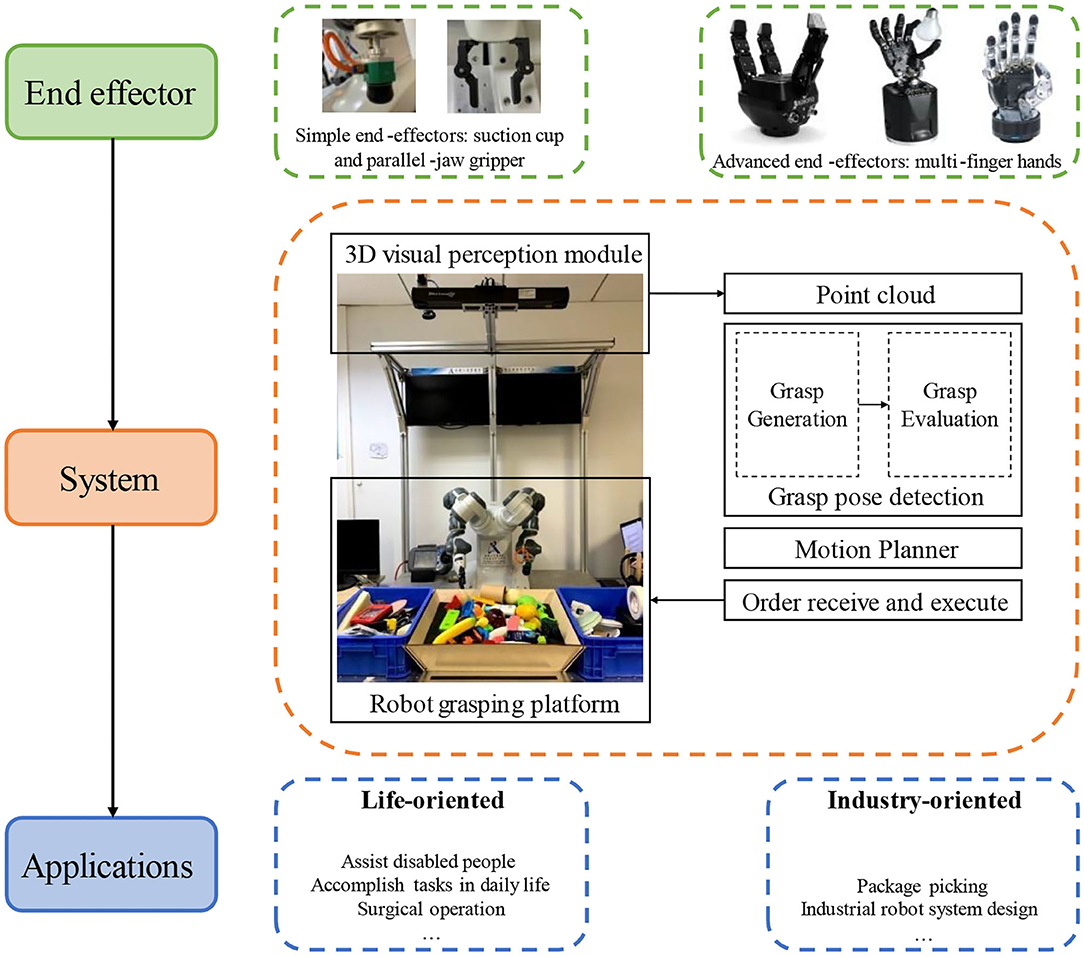
Frontiers Robotics Dexterous Grasping: The Methods Based on
PDF] Efficient and Accurate Candidate Generation for Grasp Pose
3D Grasping Pose Detection Method Based on Improved PointNet
Machines, Free Full-Text
6-DoF grasp pose estimation based on instance reconstruction

PEGG-Net: Background Agnostic Pixel-Wise Efficient Grasp
Machines, Free Full-Text

Deep learning for detecting robotic grasps - Ian Lenz, Honglak Lee

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus

HGG-CNN: The Generation of the Optimal Robotic Grasp Pose Based on

Efficient and Accurate Candidate Generation for Grasp Pose
Recomendado para você
-
 La France au Mozambique on X: 🎓📚🇫🇷⚠️Candidate-se a uma21 março 2025
La France au Mozambique on X: 🎓📚🇫🇷⚠️Candidate-se a uma21 março 2025 -
 Candidate-se ao Condim21 março 2025
Candidate-se ao Condim21 março 2025 -
 Driving Urban Transitions: Candidate-se21 março 2025
Driving Urban Transitions: Candidate-se21 março 2025 -
 MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições21 março 2025
MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições21 março 2025 -
 Colocamos ao menos uma mulher por dia no mercado de trabalho21 março 2025
Colocamos ao menos uma mulher por dia no mercado de trabalho21 março 2025 -
 Fez I&D? Candidate-se ao SIFIDE até 31 de maio! - Estrategor21 março 2025
Fez I&D? Candidate-se ao SIFIDE até 31 de maio! - Estrategor21 março 2025 -
 Se Candidate Mulher' oferece 1.000 vagas em cursos gratuitos e21 março 2025
Se Candidate Mulher' oferece 1.000 vagas em cursos gratuitos e21 março 2025 -
 Mais de 50 Vagas de Emprego Disponíveis - Candidate-se Agora21 março 2025
Mais de 50 Vagas de Emprego Disponíveis - Candidate-se Agora21 março 2025 -
 Candidate-se para participar de um estudo clínico21 março 2025
Candidate-se para participar de um estudo clínico21 março 2025 -
 Candidate-se ao Auxilio Digital Emergencial 2021 — Instituto Federal de Educação, Ciência e Tecnologia de Minas Gerais Campus Ribeirão das Neves21 março 2025
Candidate-se ao Auxilio Digital Emergencial 2021 — Instituto Federal de Educação, Ciência e Tecnologia de Minas Gerais Campus Ribeirão das Neves21 março 2025
você pode gostar
-
 Alphabet Lore But It's Symbol Lore, Real-Time Video View Count21 março 2025
Alphabet Lore But It's Symbol Lore, Real-Time Video View Count21 março 2025 -
 Treat - The Endgame - GetRockMusic21 março 2025
Treat - The Endgame - GetRockMusic21 março 2025 -
 NMMI Hagerman Barracks (Roswell, New Mexico), Historic Hage…21 março 2025
NMMI Hagerman Barracks (Roswell, New Mexico), Historic Hage…21 março 2025 -
 A Netflix finalmente revela o trailer completo de Rebel Moon, o Star Wars de Zack Snyder, e é impressionante - Notícias de cinema - AdoroCinema21 março 2025
A Netflix finalmente revela o trailer completo de Rebel Moon, o Star Wars de Zack Snyder, e é impressionante - Notícias de cinema - AdoroCinema21 março 2025 -
 Brinquedo de Disco Deslizante Interativo para Cães, Música Iluminada, Jogos de Bola de Futebol de Salão, Bola Rolante Ativa, Elimina o Tédio, Material21 março 2025
Brinquedo de Disco Deslizante Interativo para Cães, Música Iluminada, Jogos de Bola de Futebol de Salão, Bola Rolante Ativa, Elimina o Tédio, Material21 março 2025 -
![Angel Beats! Complete Collection [Blu-ray] : Seiji Kishi](https://m.media-amazon.com/images/W/MEDIAX_792452-T2/images/I/71YkI-tfhUL._AC_UF894,1000_QL80_.jpg) Angel Beats! Complete Collection [Blu-ray] : Seiji Kishi21 março 2025
Angel Beats! Complete Collection [Blu-ray] : Seiji Kishi21 março 2025 -
 Caixa da matemática: jogos árvore.21 março 2025
Caixa da matemática: jogos árvore.21 março 2025 -
 Hell's Paradise: Jigokuraku Stage Play Reveals Promo Video, Visual21 março 2025
Hell's Paradise: Jigokuraku Stage Play Reveals Promo Video, Visual21 março 2025 -
 Fix New World Error Steam Must Be Running To Play This Game21 março 2025
Fix New World Error Steam Must Be Running To Play This Game21 março 2025 -
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/2/p/0omOsiQy6otHbyvfqTeA/2016-05-04-city-04.jpg) Review Uncharted 4: A Thief's End21 março 2025
Review Uncharted 4: A Thief's End21 março 2025